

关于虚拟内存有三点需要注意:
1、4G的进程地址空间被人为的分为两个部分–用户空间与内核空间。用户空间从0到3G(0xc0000000),内核空间占据3G到4G。用户进程通常情况下只能访问用户空间的虚拟地址,不能访问内核空间的虚拟地址。例外情况只有用户进程进行系统调用(代表用户进程在内核态执行)等时刻可以访问到内核空间。
2、用户空间对应进程,所以每当进程切换,用户空间就会跟着变化;而内核空间是由内核负责映射,它并不会跟着进程变化,是固定的。内核空间地址有自己对应的页表,用户进程各自有不同的页表。
3、每个进程的用户空间都是完全独立、互不相干的。
一、4G地址空间解析图
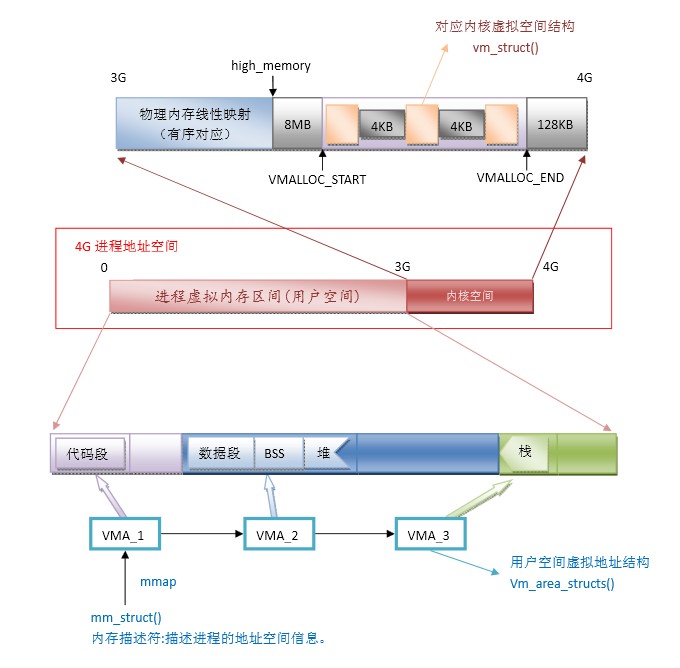
上图展示了整个进程地址空间的分布,其中4G的地址空间分为两部分,在用户空间内,对应了内存分布的五个段:数据段、代码段、BSS段、堆、栈。在上篇文章中有详细的介绍。
二、虚拟地址空间分配及其与物理内存对应图
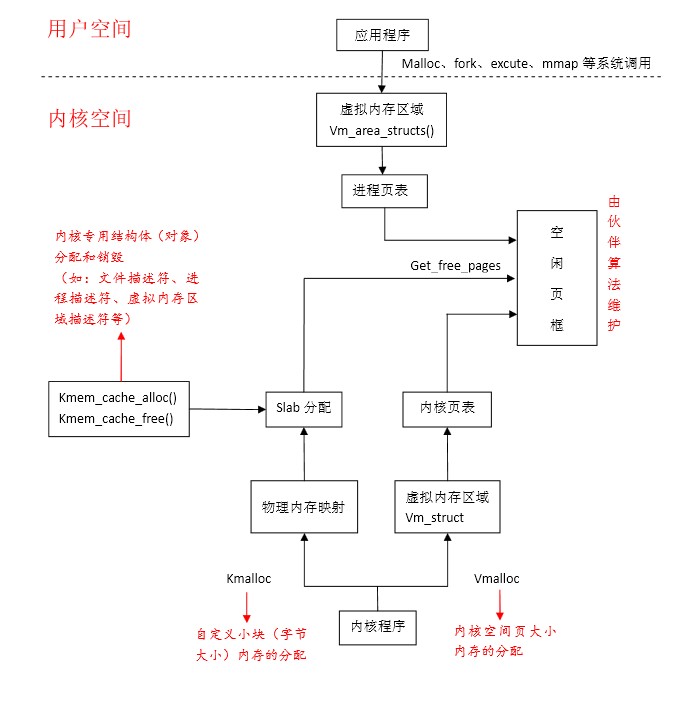
这个图示内核用户空间的划分,图中最重要的就是高端内存的映射
其中kmalloc和vmalloc函数申请的空间对应着不同的区域,同时又不同的含义。
三、物理内存分配图
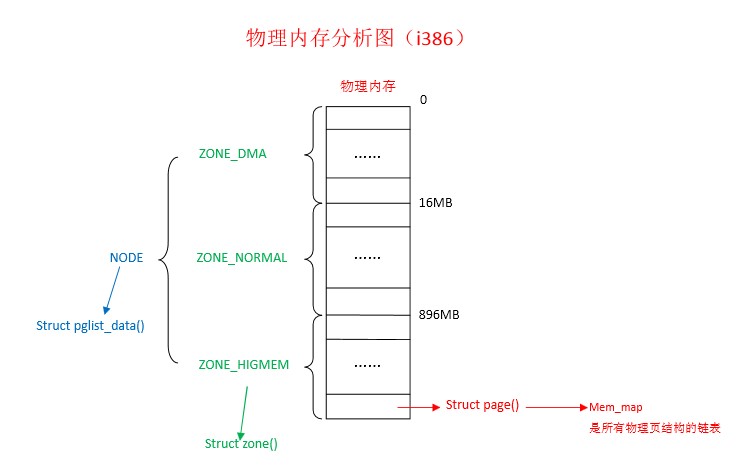
这张图中页解释了三者的不同关系,和上篇文章中的内容有相似之处。
伙伴算法:
一种物理内存分配和回收的方法,物理内存所有空闲页都记录在BUDDY链表中。首选,系统建立一个链表,链表中的每个元素代表一类大小的物理内存,分别为2的0次方、1次方、2次方,个页大小,对应4K、8K、16K的内存,没一类大小的内存又有一个链表,表示目前可以分配的物理内存。例如现在仅存需要分配8K的物理内存,系统首先从8K那个链表中查询有无可分配的内存,若有直接分配;否则查找16K大小的链表,若有,首先将16K一分为二,将其中一个分配给进程,另一个插入8K的链表中,若无,继续查找32K,若有,首先把32K一分为二,其中一个16K大小的内存插入16K链表中,然后另一个16K继续一分为二,将其中一个插入8K的链表中,另一个分配给进程……..以此类推。当内存释放时,查看相邻内存有无空闲,若存在两个联系的8K的空闲内存,直接合并成一个16K的内存,插入16K链表中。(伙伴算法用于物理内存分配方案)
SLAB算法:
是一种对伙伴算的一种补充,对于用户进程的内存分配,伙伴算法已经够好了,但对于内核进程,还需要存在一类很小的数据(字节大小,比如进程描述符、虚拟内存描述符等),若每次给几个字节的数据分配一个4KB的页,实在太浪费,于是就有了SLBA算法,SLAB算法其实就是把一个页用力劈成一小块一小块,然后再分配。