

http://blog.chinaunix.net/uid-23069658-id-3142047.html
BIOS自检
稍有计算机基础的人都应该听过BIOS(Basic Input / Output System),又称基本输入输出系统,可以视为是一个永久地记录在ROM中的一个软件,是操作系统输入输出管理系统的一部分。早期的BIOS芯片确实是"只读"的,里面的内容是用一种烧录器写入的,一旦写入就不能更改,除非更换芯片。现在的主机板都使用一种叫Flash EPROM的芯片来存储系统BIOS,里面的内容可通过使用主板厂商提供的擦写程序擦除后重新写入,这样就给用户升级BIOS提供了极大的方便。
BIOS的功能由两部分组成,分别是POST码和Runtime服务。POST阶段完成后它将从存储器中被清除,而Runtime服务会被一直保留,用于目标操作系统的启动。BIOS两个阶段所做的详细工作如下:
步骤1:上电自检POST(Power-on self test),主要负责检测系统外围关键设备(如:CPU、内存、显卡、I/O、键盘鼠标等)是否正常。例如,最常见的是内存松动的情况,BIOS自检阶段会报错,系统就无法启动起来;
步骤2:步骤1成功后,便会执行一段小程序用来枚举本地设备并对其初始化。这一步主要是根据我们在BIOS中设置的系统启动顺序来搜索用于启动系统的驱动器,如硬盘、光盘、U盘、软盘和网络等。我们以硬盘启动为例,BIOS此时去读取硬盘驱动器的第一个扇区(MBR,512字节),然后执行里面的代码。实际上这里BIOS并不关心启动设备第一个扇区中是什么内容,它只是负责读取该扇区内容、并执行。
至此,BIOS的任务就完成了,此后将系统启动的控制权移交到MBR部分的代码。
PS: 在个人电脑中,Linux的启动是从0xFFFF0地址开始的。
系统引导
我们首先来了解一下MBR,它是Master Boot Record的缩写。硬盘的0柱面、0磁头、1扇区称为主引导扇区。它由三个部分组成,主引导程序(Bootloader)、 硬盘分区表DPT(Disk Partition table)和硬盘有效标志(55AA),其结构图如下所示:
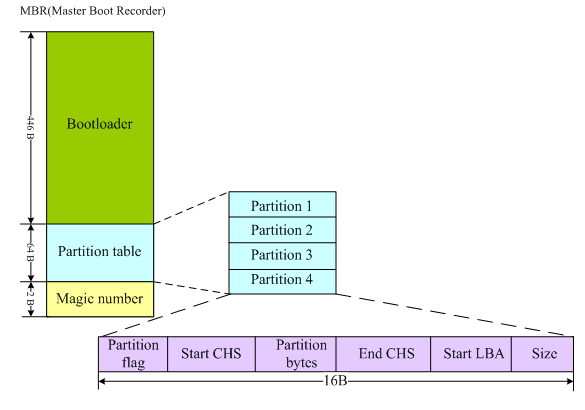
磁盘分区表包含以下三部分:
1)、Partition ID (5:延申 82:Swap 83:Linux 8e:LVM fd:RAID)
2)、Partition起始磁柱
3)、Partition的磁柱数量
通常情况下,诸如lilo、grub这些常见的引导程序都直接安装在MBR中。我们以grub为例来分析这个引导过程。
grub引导也分为两个阶段stage1阶段和stage2阶段(有些较新的grub又定义了stage1.5阶段)。
1)、stage1:stage1是直接被写入到MBR中去的,这样机器一启动检测完硬件后,就将控制权交给了GRUB的代码。也就是上图所看到的前446个字节空间中存放的是stage1的代码。BIOS将stage1载入内存中0x7c00处并跳转执行。stage1(/stage1/start.S)的任务非常单纯,仅仅是将硬盘0头0道2扇区读入内存。而0头0道2扇区内容是源代码中的/stage2/start.S,编译后512字节,它是stage2或者stage1_5的入口。而此时,stage1是没有识别文件系统的能力的。如果感觉脑子有些晕了,那么下面的过程就直接跳过,去看stage2吧!
【外传】定位硬盘的0头0道2扇区的过程:
BIOS将stage1载入内存0x7c00处并执行,然后调用BIOS INIT13中断,将硬盘0头0道2扇区内容载入内存0x7000处,然后调用copy_buffer将其转移到内存0x8000处。在定位0头0道2扇区时通常有两种寻址方式:LBA和CHS。如果你是刨根问底儿型的爱好者,那么此时去找谷哥打听打听这两种方式的来龙去脉吧。
2)、stage2:严格来说这里还应该再区分个stage1.5的,就一并把stage1.5放在这里一起介绍了,免得大家看得心里乱哄哄的。好的,我们继续说0头0到2扇区的/stage2/start.S文件,当它的内容被读入到内存之后,它的主要作用就是负责将stage2或stage1.5从硬盘读到内存中。如果是stage2,它将被载入到0x820处;如果是stage1.5,它将被载入到0x2200处。这里的stage2或者stage1_5不是/boot分区/boot/grub目录下的文件,因为这个时候grub还没有能力识别任何文件系统。
如果start.S加载stage1.5:stage1.5它存放在硬盘0头0道3扇区向后的位置,stage1_5作为stage1和stage2中间的桥梁,stage1_5有识别文件系统的能力,此后grub才有能力去访问/boot分区/boot/grub目录下的 stage2文件,将stage2载入内存并执行。
如果start.S加载stage2:同样,这个stage2也不是/boot分区/boot/grub目录下的stage2,这个时候start.S读取的是存放在/boot分区Boot Sector的stage2。这种情况下就有一个限制:因为start.S通过BIOS中断方式直接对硬盘寻址(而非通过访问具体的文件系统),其寻址范围有限,限制在8GB以内。因此这种情况需要将/boot分区分在硬盘8GB寻址空间之前。
假如是情形2,我们将/boot/grub目录下的内容清空,依然能成功启动grub;假如是情形1,将/boot/grub目录下stage2删除后,则系统启动过程中grub会启动失败。
启动内核
当stage2被载入内存执行时,它首先会去解析grub的配置文件/boot/grub/grub.conf,然后加载内核镜像到内存中,并将控制权转交给内核。而内核会立即初始化系统中各设备并做相关的配置工作,其中包括CPU、I/O、存储设备等。
关于Linux的设备驱动程序的加载,有一部分驱动程序直接被编译进内核镜像中,另一部分驱动程序则是以模块的形式放在initrd(ramdisk)中。
Linux内核需要适应多种不同的硬件架构,但是将所有的硬件驱动编入内核又是不实际的,而且内核也不可能每新出一种硬件结构,就将该硬件的设备驱动写入内核。实际上Linux的内核镜像仅是包含了基本的硬件驱动,在系统安装过程中会检测系统硬件信息,根据安装信息和系统硬件信息将一部分设备驱动写入 initrd 。这样在以后启动系统时,一部分设备驱动就放在initrd中来加载。这里有必要给大家再多介绍一下initrd这个东东:
initrd 的英文含义是 bootloader initialized RAM disk,就是由 boot loader 初始化的内存盘。在 linu2.6内核启动前,boot loader 会将存储介质中的 initrd 文件加载到内存,内核启动时会在访问真正的根文件系统前先访问该内存中的 initrd 文件系统。在 boot loader 配置了 initrd 的情况下,内核启动被分成了两个阶段,第一阶段先执行 initrd 文件系统中的init,完成加载驱动模块等任务,第二阶段才会执行真正的根文件系统中的 /sbin/init 进程。
另外一个概念:initramfs
initramfs 是在 kernel 2.5中引入的技术,实际上它的含义就是:在内核镜像中附加一个cpio包,这个cpio包中包含了一个小型的文件系统,当内核启动时,内核将这个 cpio包解开,并且将其中包含的文件系统释放到rootfs中,内核中的一部分初始化代码会放到这个文件系统中,作为用户层进程来执行。这样带来的明显的好处是精简了内核的初始化代码,而且使得内核的初始化过程更容易定制。 疑惑的是:我的内核是2.6.32-71.el6.i686版本,但在我的/boot分区下面却存在的是/boot/initramfs-2.6.32-71.el6.i686.img类型的文件,没搞明白,还望高人解惑。我只知道在2.6内核中支持两种格式的initrd,一种是2.4内核的文件系统镜像image-initrd,一种是cpio格式。接下来我们就来探究一下initramfs-2.6.32-71.el6.i686.img里到底放了那些东西。
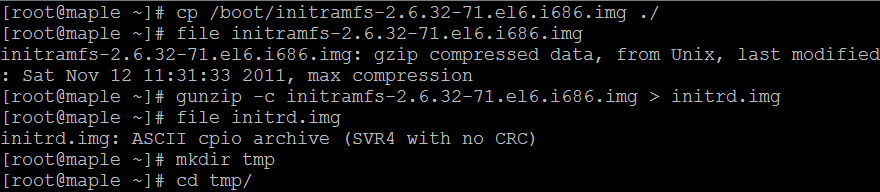
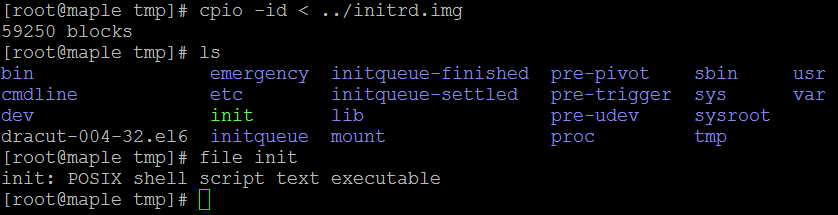
在tmp文件夹中解压initrd.img里的内容:
如果initrd.img文件的格式显示为“initrd.img:ISO 9660 CD-ROM filesystem data”,则可直接输入命令“mount -o loop initrd.img /mnt/test”进行挂载。
通过上的分析和我们的验证,我们确实得到了这样的结论:
grub的stage2将initrd加载到内存里,让后将其中的内容释放到内容中,内核便去执行initrd中的init脚本,这时内核将控制权交给了init文件处理。我们简单浏览一下init脚本的内容,发现它也主要是加载各种存储介质相关的设备驱动程序。当所需的驱动程序加载完后,会创建一个根设备,然后将根文件系统rootfs以只读的方式挂载。这一步结束后,释放未使用的内存,转换到真正的根文件系统上面去,同时运行/sbin/init程序,执行系统的1号进程。此后系统的控制权就全权交给/sbin/init进程了。
初始化系统
经过千辛万苦的跋涉,我们终于接近黎明的曙光了。接下来就是最后一步了:初始化系统。/sbin/init进程是系统其他所有进程的父进程,当它接管了系统的控制权先之后,它首先会去读取/etc/inittab文件来执行相应的脚本进行系统初始化,如设置键盘、字体,装载模块,设置网络等。主要包括以下工作:
1)、执行系统初始化脚本(/etc/rc.d/rc.sysinit),对系统进行基本的配置,以读写方式挂载根文件系统及其它文件系统,到此系统算是基本运行起来了,后面需要进行运行级别的确定及相应服务的启动。rc.sysinit所做的事情(不同的Linux发行版,该文件可能有些差异)如下:
(1)获取网络环境与主机类型。首先会读取网络环境设置文件"/etc/sysconfig/network",获取主机名称与默认网关等网络环境。
(2)测试与载入内存设备/proc及usb设备/sys。除了/proc外,系统会主动检测是否有usb设备,并主动加载usb驱动,尝试载入usb文件系统。
(3)决定是否启动SELinux。
(4)接口设备的检测与即插即用(pnp)参数的测试。
(5)用户自定义模块的加载。用户可以再"/etc/sysconfig/modules/*.modules"加入自定义的模块,此时会加载到系统中。
(6)加载核心的相关设置。按"/etc/sysctl.conf"这个文件的设置值配置功能。
(7)设置系统时间(clock)。
(8)设置终端的控制台的字形。
(9)设置raid及LVM等硬盘功能。
(10)以方式查看检验磁盘文件系统。
(11)进行磁盘配额quota的转换。
(12)重新以读取模式载入系统磁盘。
(13)启动quota功能。
(14)启动系统随机数设备(产生随机数功能)。
(15)清楚启动过程中的临时文件。
(16)将启动信息加载到"/var/log/dmesg"文件中。
当/etc/rc.d/rc.sysinit执行完后,系统就可以顺利工作了,只是还需要启动系统所需要的各种服务,这样主机才可以提供相关的网络和主机功能,因此便会执行下面的脚本。
2)、执行/etc/rc.d/rc脚本。该文件定义了服务启动的顺序是先K后S,而具体的每个运行级别的服务状态是放在/etc/rc.d/rc.d(=0~6)目录下,所有的文件均是指向/etc/init.d下相应文件的符号链接。rc.sysinit通过分析/etc/inittab文件来确定系统的启动级别,然后才去执行/etc/rc.d/rc*.d下的文件。
/etc/init.d-> /etc/rc.d/init.d
/etc/rc ->/etc/rc.d/rc
/etc/rc.d ->/etc/rc.d/rc.d
/etc/rc.local-> /etc/rc.d/rc.local
/etc/rc.sysinit-> /etc/rc.d/rc.sysinit
也就是说,/etc目录下的init.d、rc、rc*.d、rc.local和rc.sysinit均是指向/etc/rc.d目录下相应文件和文件夹的符号链接。我们以启动级别3为例来简要说明一下。
/etc/rc.d/rc3.d目录,该目录下的内容全部都是以 S 或 K 开头的链接文件,都链接到"/etc/rc.d/init.d"目录下的各种shell脚本。S表示的是启动时需要start的服务内容,K表示关机时需要关闭的服务内容。/etc/rc.d/rc.d中的系统服务会在系统后台启动,如果要对某个运行级别中的服务进行更具体的定制,通过chkconfig命令来操作,或者通过setup、ntsys、system-config-services来进行定制。如果我们需要自己增加启动的内容,可以在init.d目录中增加相关的shell脚本,然后在rc.d目录中建立链接文件指向该shell脚本。这些shell脚本的启动或结束顺序是由S或K字母后面的数字决定,数字越小的脚本越先执行。例如,/etc/rc.d/rc3.d /S01sysstat就比/etc/rc.d/rc3.d /S99local先执行。
3)、执行用户自定义引导程序/etc/rc.d/rc.local。其实当执行/etc/rc.d/rc3.d/S99local时,它就是在执行/etc/rc.d/rc.local。S99local是指向rc.local的符号链接。就是一般来说,自定义的程序不需要执行上面所说的繁琐的建立shell增加链接文件的步骤,只需要将命令放在rc.local里面就可以了,这个shell脚本就是保留给用户自定义启动内容的。
4)、完成了系统所有的启动任务后,linux会启动终端或X-Window来等待用户登录。tty1,tty2,tty3…这表示在运行等级1,2,3,4的时候,都会执行"/sbin/mingetty",而且执行了6个,所以linux会有6个纯文本终端,mingetty就是启动终端的命令。
除了这6个之外还会执行"/etc/X11/prefdm-nodaemon"这个主要启动X-Window
至此,系统就启动完毕了。以上分析不到的地方还请各位大虾不吝指正。
关于Linux的其他分析内容下次再继续写。 最后附上一张非常完整的系统启动流程图,适合各个水平阶段的读者。
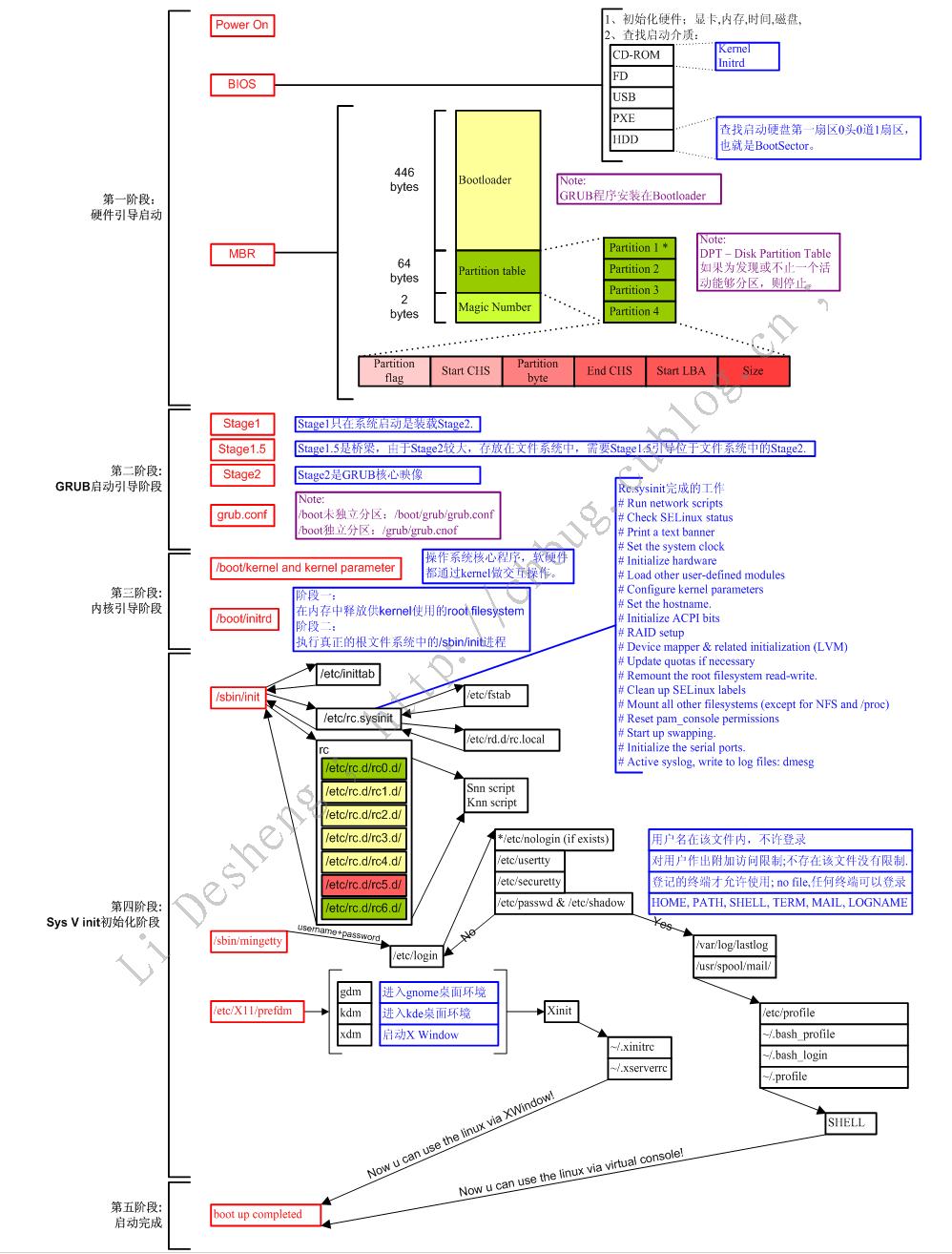
http://blog.itpub.net/8111049/viewspace-680043