EINVAL Target file system doesn't support splicing; target file is
opened in append mode; neither of the descriptors refers to a
pipe; or offset given for non-seekable device.
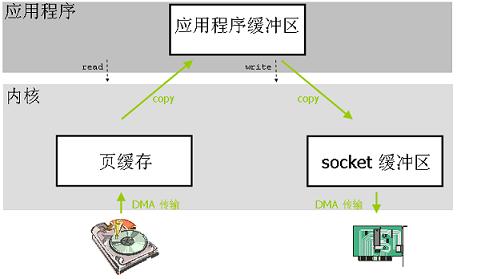
传统的 Linux 操作系统的标准 I/O 接口是基于数据拷贝操作的,即 I/O 操作会导致数据在操作系统内核地址空间的缓冲区和应用程序地址空间定义的缓冲区之间进行传输。这样做最大的好处是可以减少磁盘 I/O 的操作,因为如果所请求的数据已经存放在操作系统的高速缓冲存储器中,那么就不需要再进行实际的物理磁盘 I/O 操作。但是数据传输过程中的数据拷贝操作却导致了极大的 CPU 开销,限制了操作系统有效进行数据传输操作的能力。
零拷贝( zero-copy )这种技术可以有效地改善数据传输的性能,在内核驱动程序(比如网络堆栈或者磁盘存储驱动程序)处理 I/O 数据的时候,零拷贝技术可以在某种程度上减少甚至完全避免不必要 CPU 数据拷贝操作。现代的 CPU 和存储体系结构提供了很多特征可以有效地实现零拷贝技术,但是因为存储体系结构非常复杂,而且网络协议栈有时需要对数据进行必要的处理,所以零拷贝技术有可能会产生很多负面的影响,甚至会导致零拷贝技术自身的优点完全丧失。
为什么需要零拷贝技术
如今,很多网络服务器都是基于客户端 - 服务器这一模型的。在这种模型中,客户端向服务器端请求数据或者服务;服务器端则需要响应客户端发出的请求,并为客户端提供它所需要的数据。随着网络服务的逐渐普及,video 这类应用程序发展迅速。当今的计算机系统已经具备足够的能力去处理 video 这类应用程序对客户端所造成的重负荷,但是对于服务器端来说,它应付由 video 这类应用程序引起的网络通信量就显得捉襟见肘了。而且,客户端的数量增长迅速,那么服务器端就更容易成为性能瓶颈。而对于负荷很重的服务器来说,操作系统通常都是引起性能瓶颈的罪魁祸首。举个例子来说,当数据“写”操作或者数据“发送”操作的系统调用发出时,操作系统通常都会将数据从应用程序地址空间的缓冲区拷贝到操作系统内核的缓冲区中去。操作系统这样做的好处是接口简单,但是却在很大程度上损失了系统性能,因为这种数据拷贝操作不单需要占用 CPU 时间片,同时也需要占用额外的内存带宽。
简单一点来说,零拷贝就是一种避免 CPU 将数据从一块存储拷贝到另外一块存储的技术。针对操作系统中的设备驱动程序、文件系统以及网络协议堆栈而出现的各种零拷贝技术极大地提升了特定应用程序的性能,并且使得这些应用程序可以更加有效地利用系统资源。这种性能的提升就是通过在数据拷贝进行的同时,允许 CPU 执行其他的任务来实现的。零拷贝技术可以减少数据拷贝和共享总线操作的次数,消除传输数据在存储器之间不必要的中间拷贝次数,从而有效地提高数据传输效率。而且,零拷贝技术减少了用户应用程序地址空间和操作系统内核地址空间之间因为上下文切换而带来的开销。进行大量的数据拷贝操作其实是一件简单的任务,从操作系统的角度来说,如果 CPU 一直被占用着去执行这项简单的任务,那么这将会是很浪费资源的;如果有其他比较简单的系统部件可以代劳这件事情,从而使得 CPU 解脱出来可以做别的事情,那么系统资源的利用则会更加有效。综上所述,零拷贝技术的目标可以概括如下:
前文提到过,对于高速网络来说,零拷贝技术是非常重要的。这是因为高速网络的网络链接能力与 CPU 的处理能力接近,甚至会超过 CPU 的处理能力。如果是这样的话,那么 CPU 就有可能需要花费几乎所有的时间去拷贝要传输的数据,而没有能力再去做别的事情,这就产生了性能瓶颈,限制了通讯速率,从而降低了网络链接的能力。一般来说,一个 CPU 时钟周期可以处理一位的数据。举例来说,一个 1 GHz 的处理器可以对 1Gbit/s 的网络链接进行传统的数据拷贝操作,但是如果是 10 Gbit/s 的网络,那么对于相同的处理器来说,零拷贝技术就变得非常重要了。对于超过 1 Gbit/s 的网络链接来说,零拷贝技术在超级计算机集群以及大型的商业数据中心中都有所应用。然而,随着信息技术的发展,1 Gbit/s,10 Gbit/s 以及 100 Gbit/s 的网络会越来越普及,那么零拷贝技术也会变得越来越普及,这是因为网络链接的处理能力比 CPU 的处理能力的增长要快得多。传统的数据拷贝受限于传统的操作系统或者通信协议,这就限制了数据传输性能。零拷贝技术通过减少数据拷贝次数,简化协议处理的层次,在应用程序和网络之间提供更快的数据传输方法,从而可以有效地降低通信延迟,提高网络吞吐率。零拷贝技术是实现主机或者路由器等设备高速网络接口的主要技术之一。
现代的 CPU 和存储体系结构提供了很多相关的功能来减少或避免 I/O 操作过程中产生的不必要的 CPU 数据拷贝操作,但是,CPU 和存储体系结构的这种优势经常被过高估计。存储体系结构的复杂性以及网络协议中必需的数据传输可能会产生问题,有时甚至会导致零拷贝这种技术的优点完全丧失。在下一章中,我们会介绍几种 Linux 操作系统中出现的零拷贝技术,简单描述一下它们的实现方法,并对它们的弱点进行分析。
零拷贝技术分类
零拷贝技术的发展很多样化,现有的零拷贝技术种类也非常多,而当前并没有一个适合于所有场景的零拷贝技术的出现。对于 Linux 来说,现存的零拷贝技术也比较多,这些零拷贝技术大部分存在于不同的 Linux 内核版本,有些旧的技术在不同的 Linux 内核版本间得到了很大的发展或者已经渐渐被新的技术所代替。本文针对这些零拷贝技术所适用的不同场景对它们进行了划分。概括起来,Linux 中的零拷贝技术主要有下面这几种:
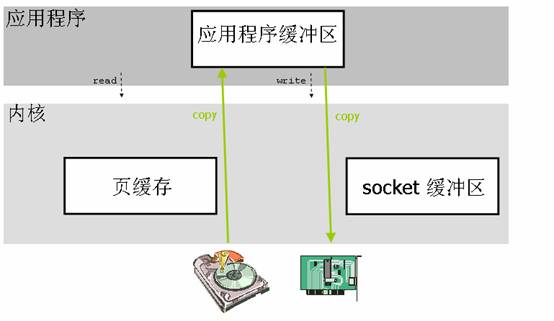
直接 I/O:对于这种数据传输方式来说,应用程序可以直接访问硬件存储,操作系统内核只是辅助数据传输:这类零拷贝技术针对的是操作系统内核并不需要对数据进行直接处理的情况,数据可以在应用程序地址空间的缓冲区和磁盘之间直接进行传输,完全不需要 Linux 操作系统内核提供的页缓存的支持。
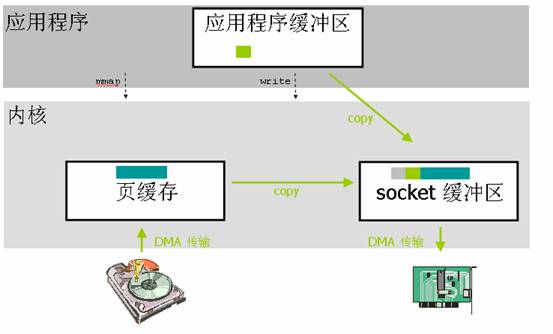
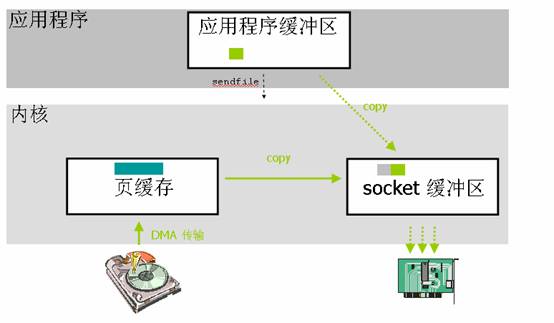
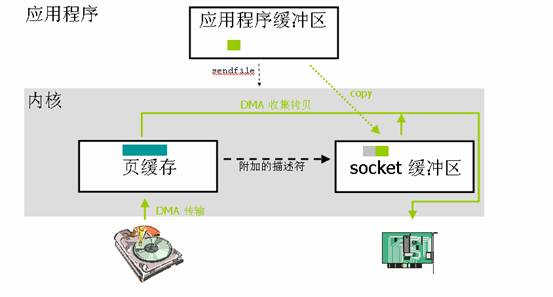
在数据传输的过程中,避免数据在操作系统内核地址空间的缓冲区和用户应用程序地址空间的缓冲区之间进行拷贝。有的时候,应用程序在数据进行传输的过程中不需要对数据进行访问,那么,将数据从 Linux 的页缓存拷贝到用户进程的缓冲区中就可以完全避免,传输的数据在页缓存中就可以得到处理。在某些特殊的情况下,这种零拷贝技术可以获得较好的性能。Linux 中提供类似的系统调用主要有 mmap(),sendfile() 以及 splice()。
对数据在 Linux 的页缓存和用户进程的缓冲区之间的传输过程进行优化。该零拷贝技术侧重于灵活地处理数据在用户进程的缓冲区和操作系统的页缓存之间的拷贝操作。这种方法延续了传统的通信方式,但是更加灵活。在 Linux 中,该方法主要利用了写时复制技术。
前两类方法的目的主要是为了避免应用程序地址空间和操作系统内核地址空间这两者之间的缓冲区拷贝操作。这两类零拷贝技术通常适用在某些特殊的情况下,比如要传送的数据不需要经过操作系统内核的处理或者不需要经过应用程序的处理。第三类方法则继承了传统的应用程序地址空间和操作系统内核地址空间之间数据传输的概念,进而针对数据传输本身进行优化。我们知道,硬件和软件之间的数据传输可以通过使用 DMA 来进行,DMA 进行数据传输的过程中几乎不需要 CPU 参与,这样就可以把 CPU 解放出来去做更多其他的事情,但是当数据需要在用户地址空间的缓冲区和 Linux 操作系统内核的页缓存之间进行传输的时候,并没有类似 DMA 这种工具可以使用,CPU 需要全程参与到这种数据拷贝操作中,所以这第三类方法的目的是可以有效地改善数据在用户地址空间和操作系统内核地址空间之间传递的效率。
总结
本系列文章介绍了 Linux 中的零拷贝技术,本文是其中的第一部分,介绍了零拷贝技术的基本概念,Linux 为什么需要零拷贝这种技术以及简要概述了 Linux 中都存在哪些零拷贝技术这样一些基本背景知识。我们将在本系列文章的第二部分内容中详细介绍本文提到的 Linux 中的几种零拷贝技术。
写时复制技术有可能会导致操作系统的处理开销很大.所有相关的缓冲区都必须要进行页对齐处理,并且使用的 MMU 页面一定要是整数个的。对于发送端来说,这不会造成什么问题。但是对于接收端来说,它需要有能力处理更加复杂的情况。首先,数据包的尺寸大小要合适,大小需要恰到好处能够覆盖一整页的数据,这就限制了那些 MTU 大小大于系统内存页的网络,比如 FDDI 和 ATM。其次,为了在没有任何中断的情况下将页面重映射到数据包的流,数据包中的数据部分必须占用整数个页面。对于异步接收数据的情况来说,为了将数据高效地移动到用户地址空间中去,可以使用这样一种方法:利用网络接口卡的支持,传来的数据包可以被分割成包头和数据两部分,数据被存放在一个单独的缓冲区内,虚拟存储系统然后就会将数据映射到用户地址空间缓冲区去。使用这种方法需要满足两个先决条件,也就是上面提到过的:一是应用程序缓冲区必须是页对齐的,并且在虚拟存储上是连续的;二是传来的数据有一页大小的时候才可以对数据包进行分割。事实上,这两个先决条件是很难满足的。如果应用程序缓冲区不是页对齐的,或者数据包的大小超过一个页,那么数据就需要被拷贝。对于数据发送端来说,就算数据在传输的过程中对于应用程序来说是写保护的,应用程序仍然需要避免使用这些忙缓冲区,这是因为写时拷贝操作所带来的开销是很大的。如果没有端到端这一级别的通知,那么应用程序很难会知道某缓冲区是否已经被释放还是仍然在被占用。
这种零拷贝技术比较适用于那种写时复制事件发生比较少的情况,因为写时复制事件所产生的开销要远远高于一次 CPU 拷贝所产生的开销。实际情况中,大多数应用程序通常都会多次重复使用相同的缓冲区,所以,一次使用完数据之后,不要从操作系统地址空间解除页面的映射,这样会提高效率。考虑到同样的页面可能会被再次访问,所以保留页面的映射可以节省管理开销,但是,这种映射保留不会减少由于页表往返移动和 TLB 冲刷所带来的开销,这是因为每次页面由于写时复制而进行加锁或者解锁的时候,页面的只读标志都要被更改。
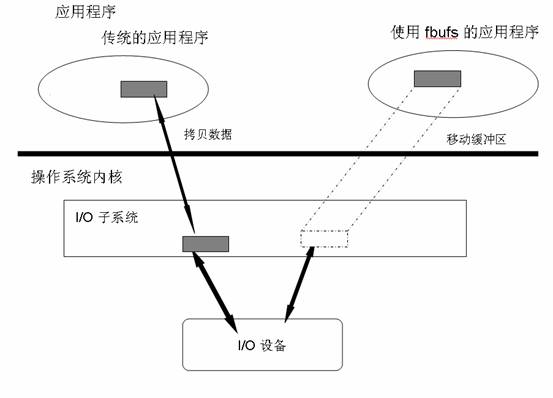
缓冲区共享
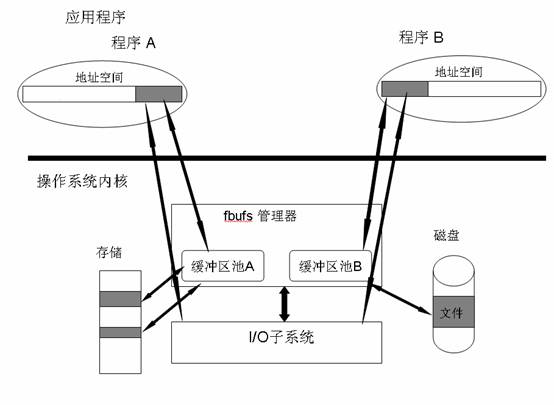
还有另外一种利用预先映射机制的共享缓冲区的方法也可以在应用程序地址空间和操作系统内核之间快速传输数据。采用缓冲区共享这种思想的架构最先在 Solaris 上实现,该架构使用了“ fbufs ”这个概念。这种方法需要修改 API。应用程序地址空间和操作系统内核地址空间之间的数据传递需要严格按照 fbufs 体系结构来实现,操作系统内核之间的通信也是严格按照 fbufs 体系结构来完成的。每一个应用程序都有一个缓冲区池,这个缓冲区池被同时映射到用户地址空间和内核地址空间,也可以在必要的时候才创建它们。通过完成一次虚拟存储操作来创建缓冲区,fbufs 可以有效地减少由存储一致性维护所引起的大多数性能问题。该技术在 Linux 中还停留在实验阶段。
为什么要扩展 Linux I/O API
传统的 Linux 输入输出接口,比如读和写系统调用,都是基于拷贝的,也就是说,数据需要在操作系统内核和应用程序定义的缓冲区之间进行拷贝。对于读系统调用来说,用户应用程序呈现给操作系统内核一个预先分配好的缓冲区,内核必须把读进来的数据放到这个缓冲区内。对于写系统调用来说,只要系统调用返回,用户应用程序就可以自由重新利用数据缓冲区。
管理共享缓冲区池需要应用程序、网络软件、以及设备驱动程序之间的紧密合作。对于数据接收端来说,网络硬件必须要能够将到达的数据包利用 DMA 传输到由接收端分配的正确的存储缓冲区池中去。而且,应用程序稍微不注意就会更改之前发到共享存储中的数据的内容,从而导致数据被破坏,但是这种问题在应用程序端是很难调试的。同时,共享存储这种模型很难与其他类型的存储对象关联使用,但是应用程序、网络软件以及设备驱动程序之间的紧密合作是需要其他存储管理器的支持的。对于共享缓冲区这种技术来说,虽然这种技术看起来前景光明,但是这种技术不但需要对 API 进行更改,而且需要对驱动程序也进行更改,并且这种技术本身也存在一些未解决的问题,这就使得这种技术目前还只是出于试验阶段。在测试系统中,这种技术在性能上有很大的改进,不过这种新的架构的整体安装目前看起来还是不可行的。这种预先分配共享缓冲区的机制有时也因为粒度问题需要将数据拷贝到另外一个缓冲区中去。
总结
本系列文章介绍了 Linux 中的零拷贝技术,本文是其中的第二部分。本文对第一部分文章中提出的 Linux 操作系统上出现的几种零拷贝技术进行了更详细的介绍,主要描述了它们各自的优点,缺点以及适用场景。对于网络数据传输来说,零拷贝技术的应用受到了很多体系结构方面因素的阻碍,包括虚拟存储体系结构以及网络协议体系结构等。所以,零拷贝技术仍然只是在某些很特殊的情况中才可以应用,比如文件服务或者使用某种特殊的协议进行高带宽的通信等。但是,零拷贝技术在磁盘操作中的应用的可行性就高得多了,这很可能是因为磁盘操作具有同步的特点,以及数据传输单元是按照页的粒度来进行的。
针对 Linux 操作系统平台提出并实现了很多种零拷贝技术,但是并不是所有这些零拷贝技术都被广泛应用于现实中的操作系统中的。比如,fbufs 体系结构,它在很多方面看起来都很吸引人,但是使用它需要更改 API 以及驱动程序,它还存在其他一些实现上的困难,这就使得 fbufs 还只是停留在实验的阶段。动态地址重映射技术只是需要对操作系统做少量修改,虽然不需要修改用户软件,但是当前的虚拟存储体系结构并不能很好地支持频繁的虚拟地址重映射操作。而且为了保证存储的一致性,重映射之后还必须对 TLB 和一级缓存进行刷新。事实上,利用地址重映射实现的零拷贝技术适用的范围是很小的,这是因为虚拟存储操作所带来的开销往往要比 CPU 拷贝所产生的开销还要大。此外,为了完全消除 CPU 访问存储,通常都需要额外的硬件来支持,而这种硬件的支持并不是很普及,同时也是非常昂贵的。
本系列文章的目的是想帮助读者理清这些出现在 Linux 操作系统中的零拷贝技术都是从何种角度来帮助改善数据传输过程中遇到的性能问题的。关于各种零拷贝技术的具体实现细节,本系列文章没有做详细描述。同时,零拷贝技术一直是在不断地发展和完善当中的,本系列文章并没有涵盖 Linux 上出现的所有零拷贝技术。
#include<sys/socket.h>
int socket(
int domain, //地址族的类型AF_UNIX (绑定在本地) AF_INET(绑定在网卡)
int type, //支持的数据格式:流SOCK_STREAM/报文SOCK_DGRAM
int protocol); //支持的协议,建议为0
返回值:
成功返回文件描述符号。
失败返回-1;